Now everything is spinning!
Before this we treated everything as a point like mass with no rotation and with all of the mass at the center of the object. That is however, not how the real would works since in the real world objects can have extended mass and can rotate.
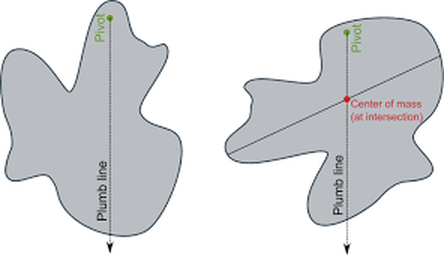
Finding the center of mass:
Every object has a center of mass that can be found using the hang test. This is where you hang the object by a point two different points and drawing a vertical line from each of those points. Where the lines intersect is the center of mass.
Before this we treated everything as a point like mass with no rotation and with all of the mass at the center of the object. That is however, not how the real would works since in the real world objects can have extended mass and can rotate.
Finding the center of mass:
Every object has a center of mass that can be found using the hang test. This is where you hang the object by a point two different points and drawing a vertical line from each of those points. Where the lines intersect is the center of mass.
https://www.khanacademy.org/science/physics/linear-momentum/center-of-mass/a/what-is-center-of-mass
Rotational Kinematics
It's basically the same when it comes to the base level formulas but the values are different.
Instead of position (x), rotating objects have angular position (θ) in radians
Instead of velocity (v), rotating objects have angular velocity (ω) in radians/second
Instead of acceleration (a), rotating objects have angular acceleration (α) in radians/second/second.
It's basically the same when it comes to the base level formulas but the values are different.
Instead of position (x), rotating objects have angular position (θ) in radians
Instead of velocity (v), rotating objects have angular velocity (ω) in radians/second
Instead of acceleration (a), rotating objects have angular acceleration (α) in radians/second/second.
Torque:
Torque is the rotational motion of an object and is the rotational equivalent of force. It is what causes angular acceleration (something spinning). Torque (τ) is the force applied at a certain distance and is measured in Newton Meters. The only force that is taken into account is the part that is perpendicular to the torque arm, or radius between the axis of rotation and the force that contributes to the torque.
Torque is the rotational motion of an object and is the rotational equivalent of force. It is what causes angular acceleration (something spinning). Torque (τ) is the force applied at a certain distance and is measured in Newton Meters. The only force that is taken into account is the part that is perpendicular to the torque arm, or radius between the axis of rotation and the force that contributes to the torque.
Rotational Inertia:
Rotational Inertia (I) is the objects tendency to resist angular acceleration. it depends on the objects mass and how it is distributed throughout the object. Rotational Inertia is different for different objects formulaically but it is always proportional to the mass and the square of the radius of that mass. The formula for a ring is I = mr^2
Newton Second Law is also applicable to rotational inertia
Net Torque = Rotational Inertia • Angular Acceleration
Σ τ = I • α
Rotational objects have kinetic energy just like sliding objects do just with different variables
Kinetic Energy = 1/2 • Rotational Inertia • (Angular velocity)squared
K = 1/2 I • ω^2
Objects can also have angular momentum (L) which is the product of the angular inertia and angular velocity of an object. Just like any other object the change in angular momentum is an impulse and that impulse is the torque applied over a period of time.
Rotational Inertia (I) is the objects tendency to resist angular acceleration. it depends on the objects mass and how it is distributed throughout the object. Rotational Inertia is different for different objects formulaically but it is always proportional to the mass and the square of the radius of that mass. The formula for a ring is I = mr^2
Newton Second Law is also applicable to rotational inertia
Net Torque = Rotational Inertia • Angular Acceleration
Σ τ = I • α
Rotational objects have kinetic energy just like sliding objects do just with different variables
Kinetic Energy = 1/2 • Rotational Inertia • (Angular velocity)squared
K = 1/2 I • ω^2
Objects can also have angular momentum (L) which is the product of the angular inertia and angular velocity of an object. Just like any other object the change in angular momentum is an impulse and that impulse is the torque applied over a period of time.
Widget is loading comments...
